望遠鏡的發(fā)明及其性能的提升使得人們能夠逐步觀(guān)察到更遠、更暗的物體。但是風(fēng)力矩、平臺晃動(dòng)、結構振動(dòng)等外部干擾力矩會(huì )引起望遠鏡的光軸振動(dòng),從而影響成像質(zhì)量和其觀(guān)察微弱目標的能力。因此,為了達到望遠鏡的衍射極限,必須抑制光軸振動(dòng)對望遠鏡的成像影響。
在傳統的閉環(huán)反饋控制方法中,由于圖像傳感器本身具有采樣頻率低、曝光時(shí)間長(cháng)的因素,給控制回路帶來(lái)了時(shí)間延遲,限制了閉環(huán)控制的帶寬,難于抑制寬頻以及大幅度的振動(dòng)。由此,學(xué)者們相繼提出了許多新穎的振動(dòng)抑制方法,如線(xiàn)性二次高斯(linear quadratic Gaussian, LQG)控制和擾動(dòng)前饋(disturbance feed forward, DFF)控制。已有的實(shí)驗結果表明,這些方法確實(shí)提高了系統的閉環(huán)性能,但它們計算耗時(shí)長(cháng),更重要的是需要依賴(lài)于控制系統模型以及擾動(dòng)模型的辨識精度。
為了降低對精確模型的依賴(lài)以及提高算法的實(shí)時(shí)性,相關(guān)學(xué)者們提出了擾動(dòng)觀(guān)測器控制方法。以光電所為依托單位的中國科學(xué)院光束控制重點(diǎn)實(shí)驗室的研究人員重點(diǎn)開(kāi)展了基于誤差的擾動(dòng)觀(guān)測器的研究,在不增加控制帶寬的前提下僅僅利用圖像傳感器,通過(guò)引入不改變閉環(huán)極點(diǎn)的低通類(lèi)型濾波器,減輕控制模型的依賴(lài),增強閉環(huán)性能的魯棒性,從而提高對中、高頻擾動(dòng)的抑制能力,減小了振動(dòng)對光軸的影響。
研究團隊綜述了當前望遠鏡中關(guān)于振動(dòng)抑制的控制技術(shù):比例積分(proportional integral, PI)控制、線(xiàn)性二次高斯(LQG)控制、擾動(dòng)前饋(DFF)控制和基于傾斜鏡的擾動(dòng)觀(guān)測器(disturbance observer, DOB)控制的研究現狀,對它們進(jìn)行了系統、全面的比較,并通過(guò)控制系統的靈敏度函數分析了它們各自的優(yōu)缺點(diǎn)。現有的控制方法依賴(lài)于精確的系統模型以及準確的擾動(dòng)信號。研究團隊提出的基于誤差的擾動(dòng)觀(guān)測器(error-based disturbance observer)方法可以通過(guò)設計合理的Q濾波器來(lái)降低對精確的系統模型的依賴(lài),并且不增加額外的傳感器。該綜述重點(diǎn)介紹了此種控制器的原理、設計方法,并在此基礎上針對復雜的擾動(dòng)設計了不同類(lèi)型濾波器。綜合實(shí)驗結果可以知道,基于誤差的觀(guān)測器控制方法不僅可以極大程度地衰減干擾頻率處的擾動(dòng),而且在非干擾頻率處也不會(huì )有較大的放大作用(waterbed effect)。
論文鏈接:http://www.oejournal.org/J/OEA/Article/Details/A191018000018
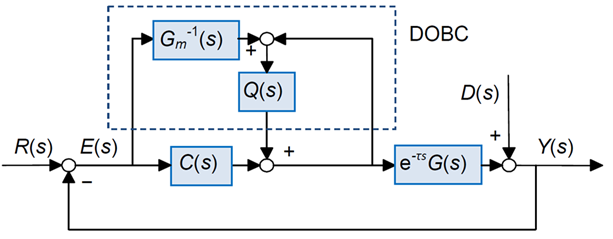
圖1 基于誤差的DOBC傾斜鏡結構
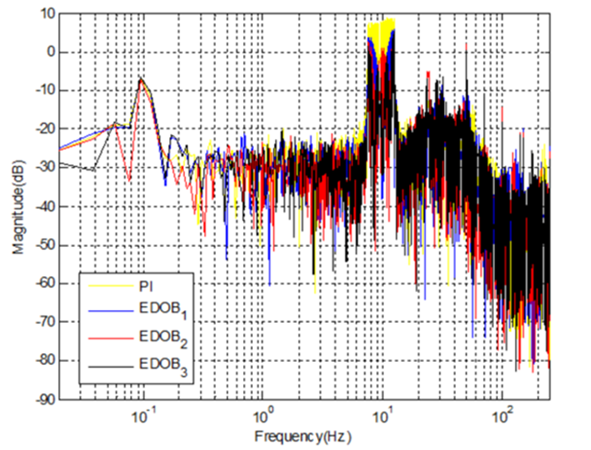
圖2 誤差抑制頻率響應